 Kittys Tech Blog
Kittys Tech Blog
Abstandsmessung mit dem Ultraschallsensor
Mit einem Ultraschallsensor können Abstände gemessen werden. Verbreitet ist der Ultraschallsensor HC-SR04.
Er hat vier Anschlüsse:
- VCC: 5V
- GND
- Trigger
- Echo
Ich nutze den HC-S05. Er hat noch einen Anschluss mehr, man ihn aber wie einen HC-SR04 nutzen.
Der Sensor funktioniert vereinfacht wie folgt:
Durch Setzen des Trigger-Pins auf 1 für 0,01 ms verschickt der Sensor einen Puls von Ultraschallwellen. Werden diese von einem Objekt in einer bestimmten Entfernung reflektiert, erkennt ein Empfänger im Sensor dieses Echo. Danach geht liegt am Echo-Pin für einen bestimmten Zeitraum ein Wert von 1 an. Aus der Zeitdauer dieses Echo-Pulses kann dann mit Hilfe der Schallgeschwindigkeit der Abstand berechnet werden:
Entfernung = Laufzeit * Schallgeschwindigkeit / 2
Eine genauere Beschreibung ist beispielsweise hier zu finden:
Steuerung mit dem Raspberry Pi
Aufbau und Komponenten
Man braucht:
- ein Raspberry Pi (z.B. Zero)
- den Ultraschallsensor
- ein Breadboard
- ein Widerstand 470 Ω
- ein Widerstand 330 Ω
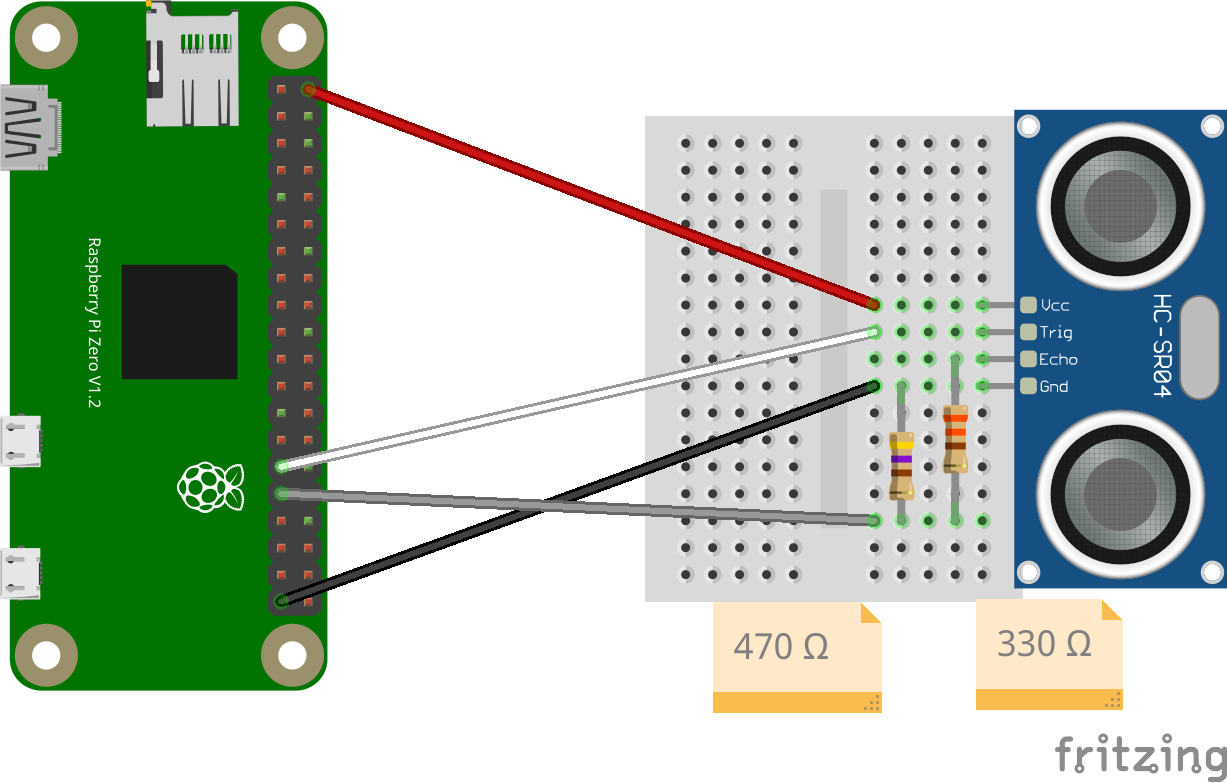
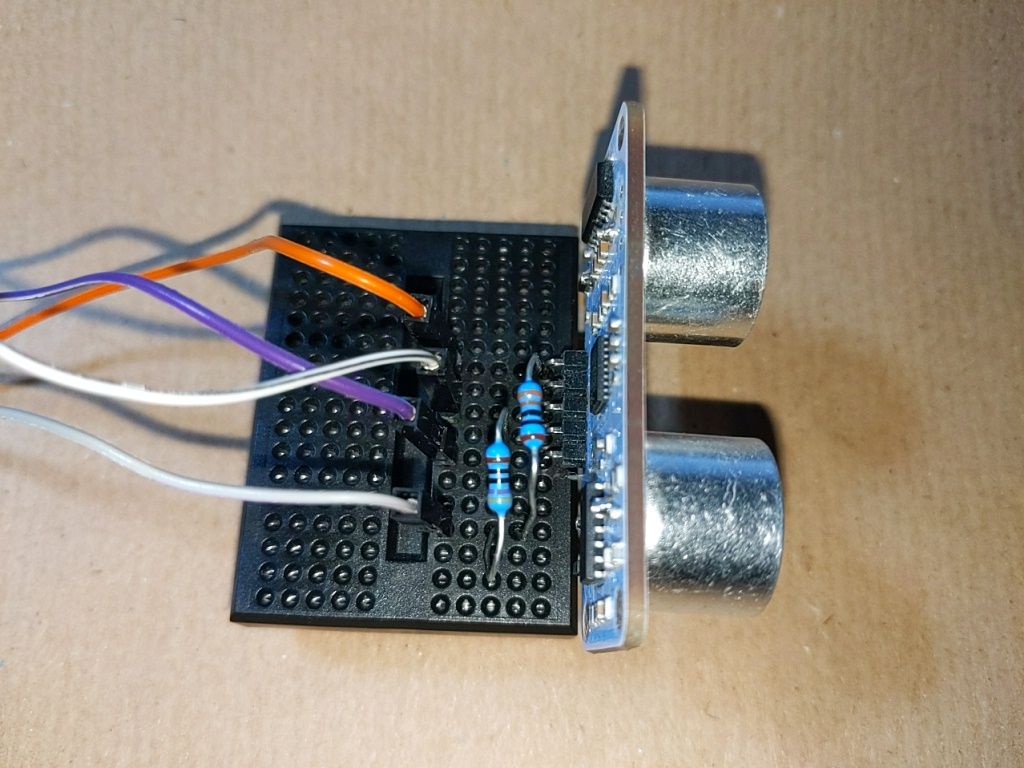
Die Widerstände werden für einen Spannungsteiler benötigt. Dadurch wird sichergestellt, dass der GPIO-Eingang des Raspi nicht mehr als 3,3 V bekommt.
Die maximal an GPIO-Eingang anliegende Spannung kann man wie folgt berechnen:
U = 5 V / (470 Ω + 330 Ω) * 470 Ω = 3 V
Programmierung mit RPi.GPIO
In nachfolgendem Python-Programm kann man die einzelnen Schritte der Messung gut nachvollziehen.
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO_TRIGGER = 5
GPIO_ECHO = 6
GPIO.setup(GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(GPIO_ECHO, GPIO.IN)
# Timeout - wie lange wird auf Anfang bzw. Ende des Echo-Pulses gewartet
timeout = .04
def get_distance():
# TRIGGER auf High
GPIO.output(GPIO_TRIGGER, True)
# Trigger auf Low (nach 0.01ms)
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
# Warten auf Echo-Beginn
pulse_start = time.time()
timeout_end = pulse_start + timeout
while GPIO.input(GPIO_ECHO) == 0 and pulse_start < timeout_end:
pulse_start = time.time()
# Warten auf Echo-Ende
pulse_end = time.time()
timeout_end = pulse_end + timeout
while GPIO.input(GPIO_ECHO) == 1 and pulse_end < timeout_end:
pulse_end = time.time()
# Dauer Echo-Puls berechnen
pulse_duration = pulse_end - pulse_start
# Entfernung über Schallgeschwindigkeit (34300 cm/s) einbeziehen
distance = (pulse_duration * 34300) / 2
return distance
if __name__ == '__main__':
try:
while True:
distanz = get_distance()
print ("Distanz = %.1f cm" % distanz)
time.sleep(1)
# Programm beenden
except KeyboardInterrupt:
print("Programm abgebrochen")
GPIO.cleanup()
Programmierung mit gpiozero
Die Klasse DistanceSensoraus der gpiozero-Bibliothek nimmt einem hier Arbeit ab. Ein vergleichbares Programm sieht so aus:
from gpiozero import DistanceSensor
from time import sleep
sensor = DistanceSensor(echo=6, trigger=5)
while True:
print('Distance: ', sensor.distance * 100)
sleep(1)
Zusätzlich hat man die Möglichkeit callback-Funktionen festzulegen, die ausgeführt werden, wenn die Distanz unter einen bestimmten Wert sinkt (when_in_range), bzw. über diesen Wert steigt(when_out_of_range). Die threshhold_distance gibt dabei den Grenzwert in Metern an.
from gpiozero import DistanceSensor
from time import sleep
def in_range_func():
print("nah")
def out_range_func():
print("fern")
sensor = DistanceSensor(echo=6, trigger=5, threshold_distance=.2)
sensor.when_in_range = in_range_func
sensor.when_out_of_range = out_range_func
pause()
Nutzt man gpiozero, sollte man für bessere Messergebnisse den pigpiod aktivien. Falls er noch nicht installiert ist, muss man ihn zunächst installieren:
sudo apt-get install pigpio
Dann kann man ihn aktivieren:
sudo systemctl start pigpiod
Damit er immer gleich nach dem Systemstart läuft, kann man ihn enablen:
sudo systemctl enable pigpiod
Steuerung mit dem ESP32
Man braucht:
- ein ESP32 Entwicklerboard
- den Ultraschallsensor
- ein Breadboard
- ein Widerstand 470 Ω
- ein Widerstand 330 Ω
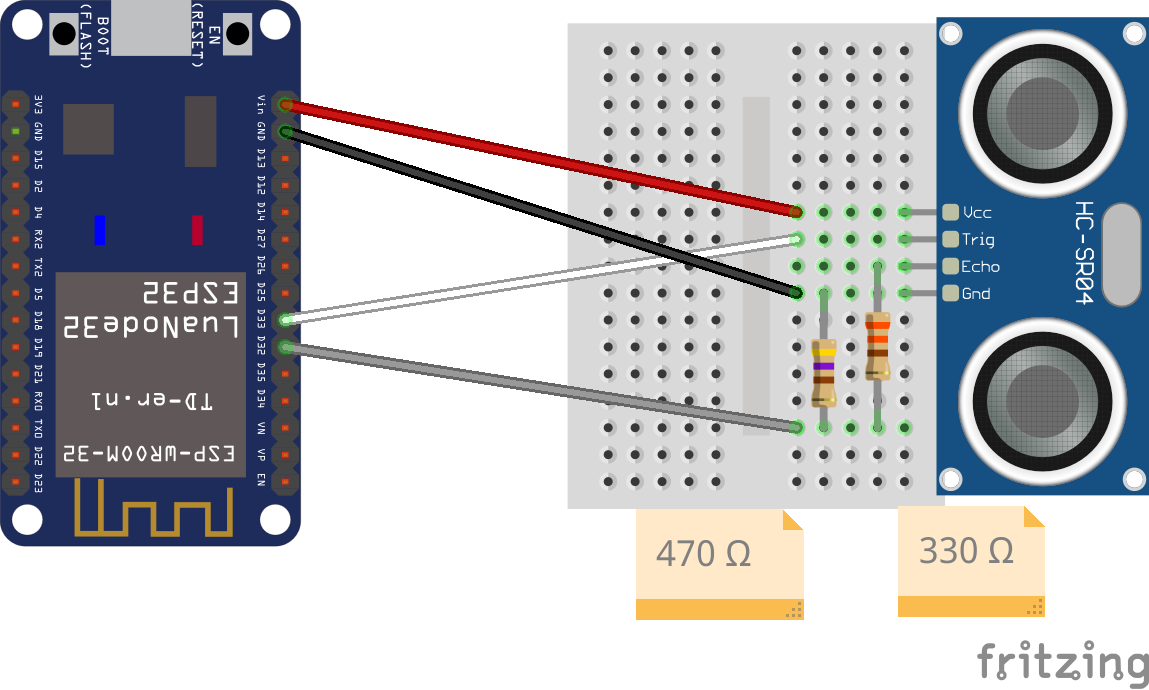
Die Widerstände werden für einen Spannungsteiler benötigt. Dadurch wird sichergestellt, dass der GPIO-Eingänge des ESP-32 nicht mehr als 3,3 V bekommt.
Die maximal an GPIO-Eingang anliegende Spannung kann man wie folgt berechnen:
U = 5 / (470 Ω + 330 Ω) * 470 Ω = 3 V
Programmierung
Die Programmierung kann man ähnlich wie beim Raspberry Pi machen:
from machine import Pin
import time
trigger_pin = Pin(33, Pin.OUT)
echo_pin = Pin(32, Pin.IN)
# Timeout - wie lange wird auf Anfang bzw. Ende des Echo-Pulses gewartet
timeout_us = 40000
def get_distance():
trigger_pin.value(0) # Stabilize the sensor
time.sleep_us(5)
# TRIGGER auf High
trigger_pin.value(1)
# Trigger auf Low (nach 0.01ms)
#time.sleep(0.00001)
time.sleep_us(10)
trigger_pin.value(0)
# Warten auf Echo-Beginn
pulse_start = time.ticks_us()
timeout_end = pulse_start + timeout_us
while echo_pin.value() == 0 and pulse_start < timeout_end:
pulse_start = time.ticks_us()
# Warten auf Echo-Ende
pulse_end = time.ticks_us()
timeout_end = pulse_end + timeout_us
while echo_pin.value() == 1 and pulse_end < timeout_end:
pulse_end = time.ticks_us()
# Dauer Echo-Puls berechnen
pulse_duration = (pulse_end - pulse_start) / 1000000 # Wert in Sek
# Entfernung über Schallgeschwindigkeit (34300 cm/s) einbeziehen
distance = (pulse_duration * 34300) / 2
return distance
while True:
distanz = get_distance()
print ("Distanz = %.1f cm" % distanz)
time.sleep(1)
Alternativ kann man die fertige Klasse HCSR04 aus folgendem Github Repository verwenden:
Steuerung mit dem Calliope
Da der Calliope keinen 5V-Ausgang hat und mein Ultraschallsensor 5V benötigt, kann man ihn leider nicht direkt am Calliope betreiben.
Lösungmöglichkeiten sind:
- Nutzung eines Ultraschallsensors für 3,3 Volt
- externe Stromversorgung für den Ultraschallsensor
- Einatz eines Level-Shifters