 Kittys Tech Blog
Kittys Tech Blog
Ansteuerung von Gleichstrommotoren
Die Gleichstrommotoren benötigen viel mehr Strom als die Pins des Microcontrollers liefern können. Daher benötigt man einen Motortreiber um den von einer weiteren Spannungsquelle gelieferten Strom über die Pins zu schalten.
Motormodul mit L298N-Chip
Mit dem Motormodul mit L298N-Chip kann man ein oder zwei Gleichstrommotoren vorwärts und rückwärts betreiben.
Man kann ihn für den Raspberry Pi, den ESP32 und den Arduino. Er funktioniert auch am Calliope mini - so können auch dort zwei Motoren vorwärts und rückwärts betrieben werden.
Folgendes Bild zeigt das Motormodul:
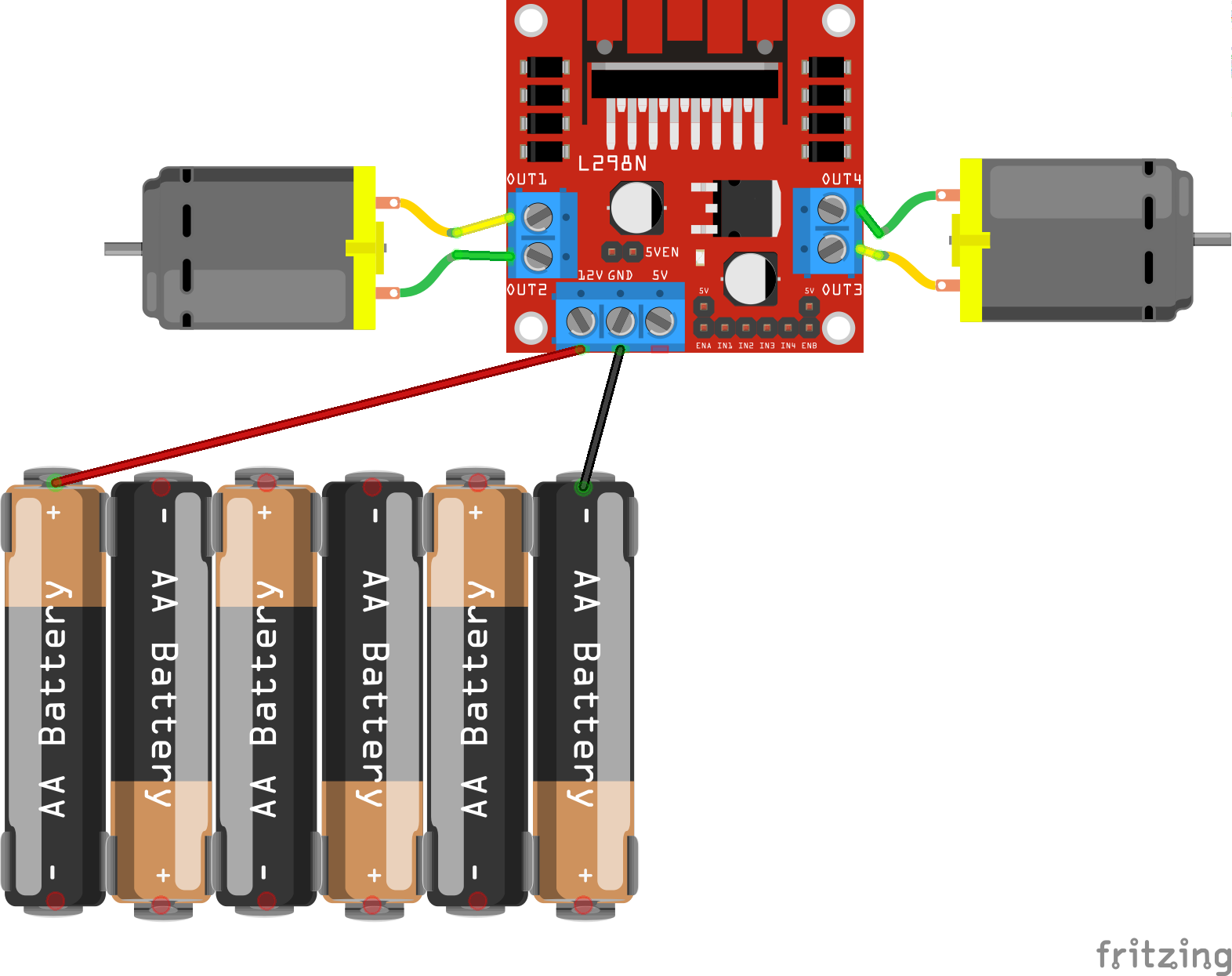
An die Ausgänge an beiden Seiten werden die Gleichstrommotoren angeschlossen.
Links unten wird der Motortreiber mit Spannung versorgt:
- Versorgungsspannung
- Ground
Rechts unten befinden sich die Steuereingänge für die beiden Motoren. Diese können mit digitalen Ausgängen von Calliope, Raspi oder Arduino verbunden werden. Der Ground des Microcontrollers muss dann noch mit dem Ground des Motortreibers verbunden werden.
Die Steuereingänge für Motor A sind:
- ENA
- IN1
- IN2
und die für Motor B:
- ENB
- IN3
- IN4
Folgenden Tabellen kann man entnehmen, wie die Eingänge beschaltet werden müssen:
| ENA | IN1 | IN2 | Beschreibung |
|---|---|---|---|
| 0 | N/A | N/A | Motor A aus |
| 1 | 0 | 0 | Motor A bremsen |
| 1 | 0 | 1 | Motor A vorwärts |
| 1 | 1 | 0 | Motor A rückwärts |
| 1 | 1 | 1 | Motor A bremsen |
| ENB | IN3 | IN4 | Beschreibung |
|---|---|---|---|
| 0 | N/A | N/A | Motor B aus |
| 1 | 0 | 0 | Motor B bremsen |
| 1 | 0 | 1 | Motor B vorwärts |
| 1 | 1 | 0 | Motor B rückwärts |
| 1 | 1 | 1 | Motor B bremsen |
An ENA und ENB kann ein PWM-Signal angelegt und damit die Geschwindigkeit gesteuert werden.
Motorshields
Es gibt für den Arduino und den Raspberry Pi auch Motor-Shields. Diese habe ich bislang noch nicht getestet.
Calliope-Mini-Motortreiber
Beim Calliope-Mini ist bereits ein Motortreiber integriert. Näheres hierzu in diesem Post