 Kittys Tech Blog
Kittys Tech Blog
Calliope Hardware und Pins
Infos zum Calliope gibt es unter https://calliope.cc
Der Calliope hat die folgenden Aktoren integriert:
- 5 x 5 LED-Matrix
- Farb-LED
- Tonausgabe
Zudem enthält er die folgenden Sensoren
- Tasten A / B
- PIN 0 bis 3 an den “Ecken”
- Lage- / Beschleunigungssensor
- Kompass
- Mikrofon
- Temperatursensor
- Lichtsensor
Pinout
Der Calliope hat folgende Pin-Belegung:

Direkt nutzbar sind folgende Pins: C0, C1, C2, C3 - davon C1 und C2 mit PWM C16 und C17
Nach Deaktivierung der LED sind zusätzlich nutzbar: C4 - C12
Von folgenden Pins können statt digitalen Werten auch analoge Werte gelesen werden: P1, P2, C4, C5, C6, C16 und C17
C18 und C19 sind für den Anschluss von Komponenten über I2C gedacht.
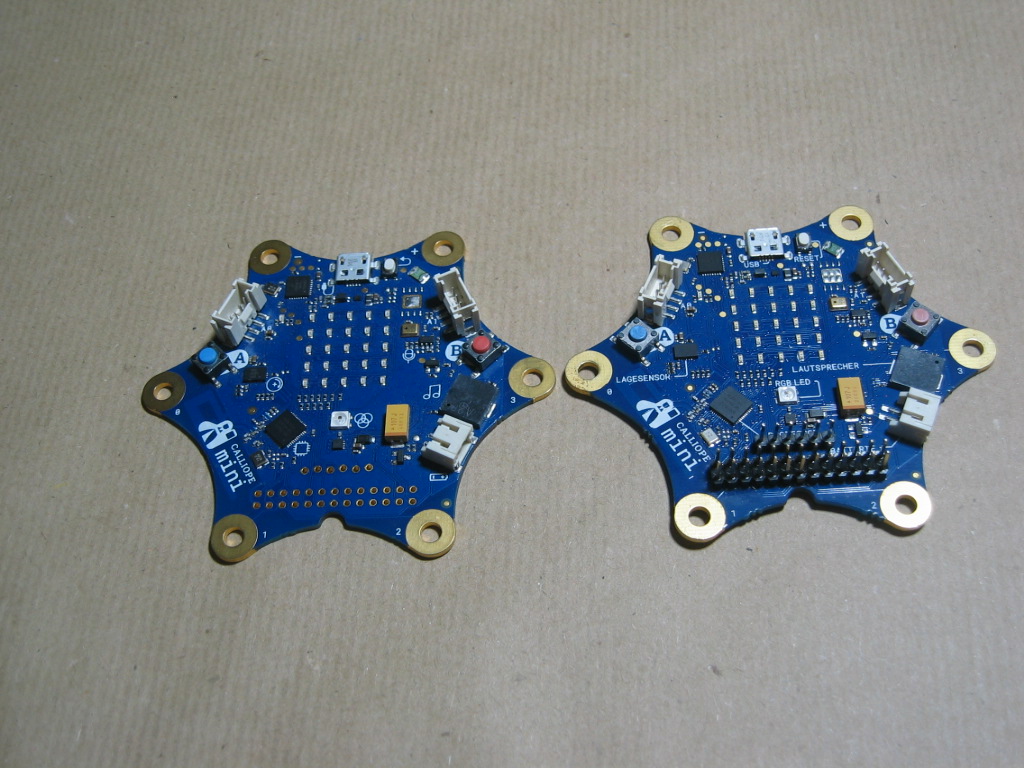
Um die 6 Motorpins und die darunterliegenden 26 weiteren Pins mit Jumperkabeln zu nutzen ist es hilfreich, an die “Löcher” eine Pinleiste anzulöten. Folgendes Bild zeigt einen Calliope ohne und einen mit angelöteter Pinleiste.
Motortreiber des Callipe mini
Beim Calliope Mini ist ein einfacher Motortreiber an Bord. Mit diesem kann man entweder
- zwei Motoren vorwärts oder
- einen Motor vorwärts und rückwärts betreiben
Auf dem Calliope gibt es dafür die mittlere Pinleiste mit 6 Pins (altes Modell 5 Pins). An diese schließt man einerseits die Spannungsquelle und andererseits den bzw. die Motoren an.
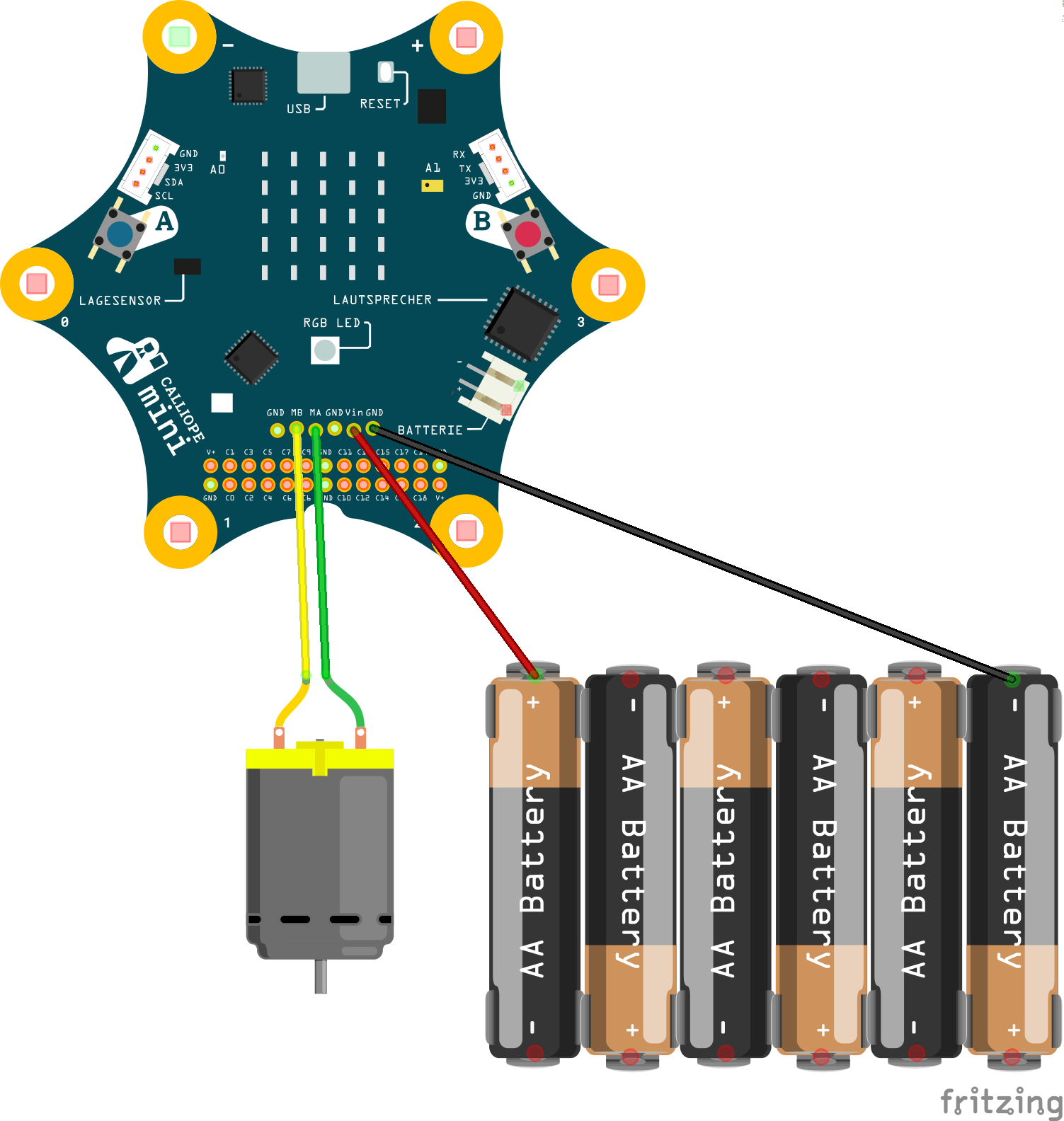
Im sogenannten Einmotorenbetrieb schließt man den Motor wie folgt an:
- der eine Anschluss des Motors wird mit dem Pin für Motor A verbunden (dritter Motorpin von links)
- der andere Anschluss des Motors wird mit dem Pin Motor B verbunden (zweiter Motorpin von links)
- die externe Spannungsquelle (bis 9V) wird mit dem fünften Motorpin von links
- Ground der externen Spannungsquelle wird mit dem sechsten Motorpin von links verbunden.
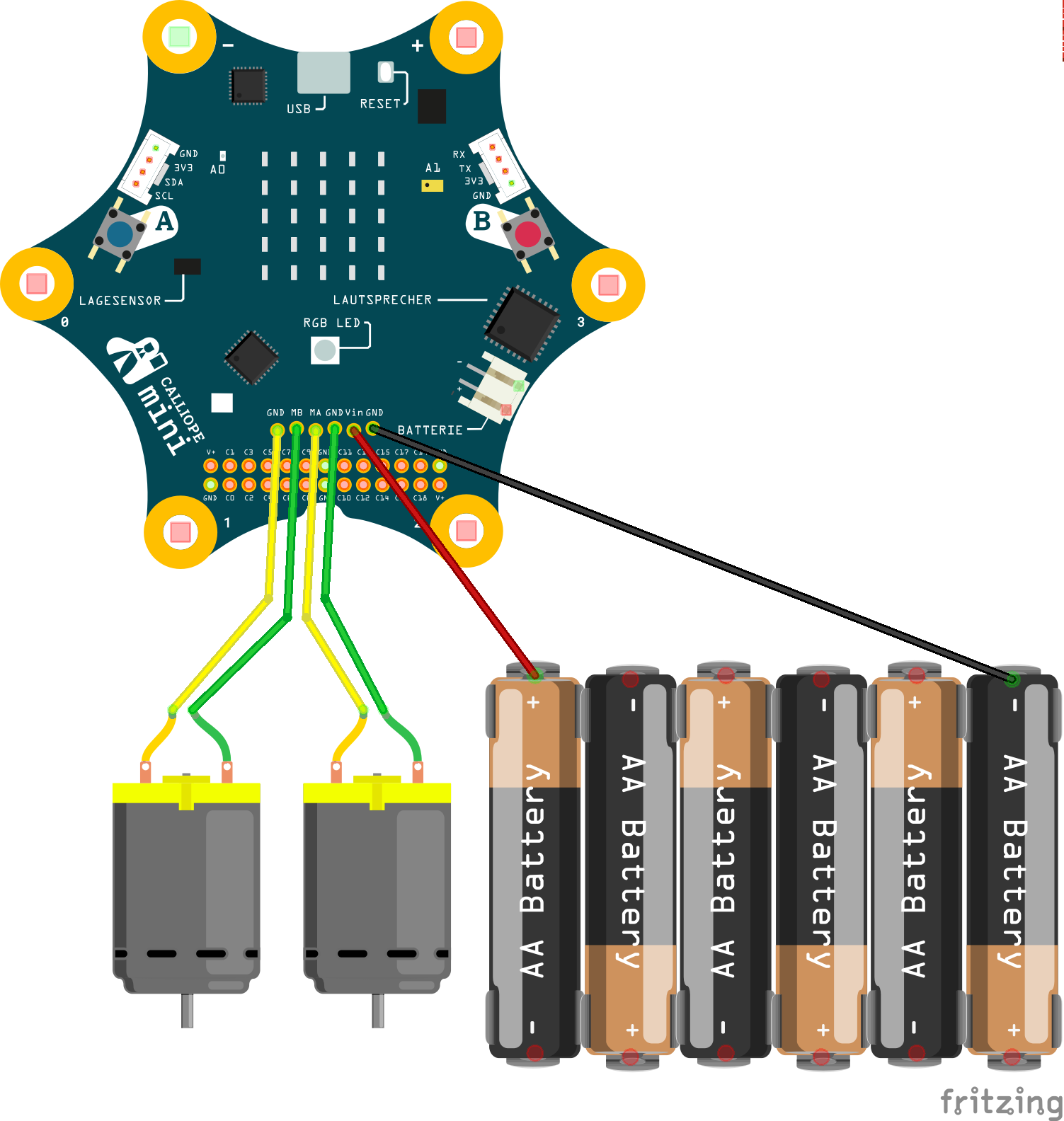
Im sogenannten Zweimotorenbetrieb sieht das ganze dann so aus:
- Motor A wird mit Pin für Motor A und Ground verbunden (Motorpins 3 und vier)
- Motor B wird mit Pin für Motor B und Ground verbunden (Motorpins)
- die externe Spannungsquelle (bis 9V) wird mit dem fünften Motorpin von links
- Ground der externen Spannungsquelle wird mit dem sechsten Motorpin von links verbunden.
Im Einmotorenbetrieb kann man den Motor so programmieren, dass er sich vorwärts oder rückwärts dreht. Im Zweimotorenbetrieb können sich die beiden Motoren immer nur vorwärts drehen. Die Geschwindigkeit kann man in beiden Fällen regulieren.