 Kittys Tech Blog
Kittys Tech Blog
Geekservo
Zufällig bin ich auf die folgenden “Geekservo”-Motoren gestoßen, die man prima für Lego-Robotik-Projekte verwenden kann, denn die Motor-Achsen sind Lego-Technic-Achsen und die Motoren können über Noppen bzw. Verbinder mit Lego bzw. Lego-Technic verbunden werden.
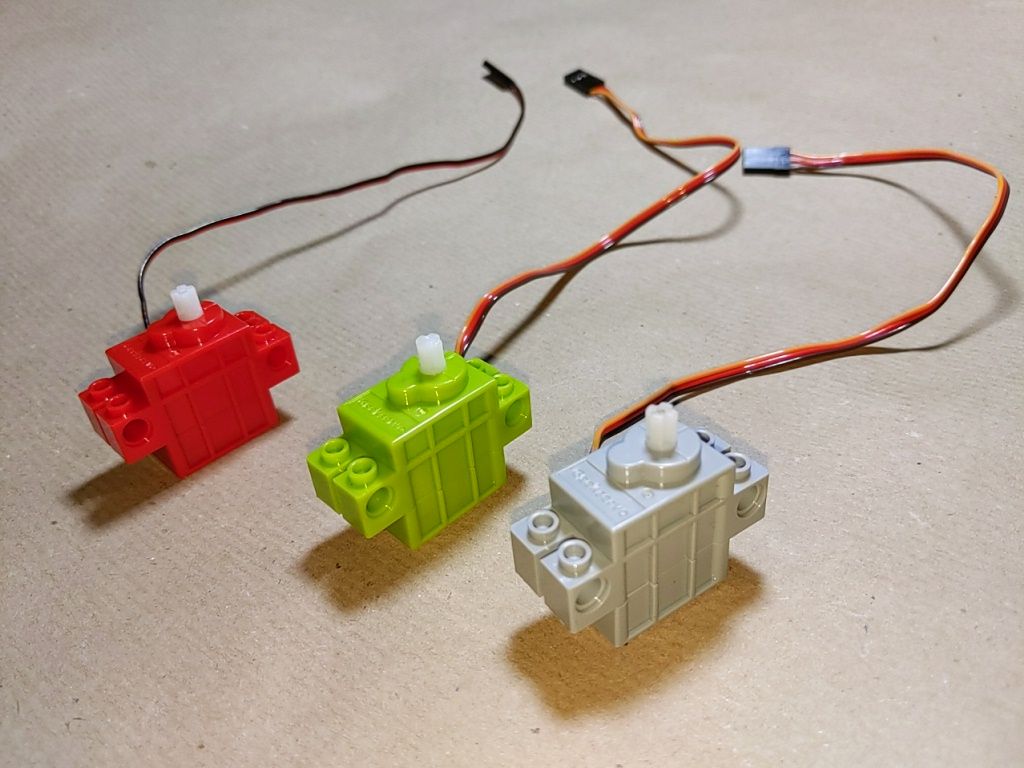
Es gibt drei verschiedene Geek-Servos:
Roter Geekservo
Der rote Geekservo (Geekservo Motor) ist eigentlich gar kein Servomotor, sondern ein Gleichstrommotor, der eine Spannung zwischen 3,3 und 6 Volt benötigt. Er hat zwei Anschlüsse:
- Rot für die Versorgungsspannung von 5 V
- Schwarz für Ground
Er kann direkt an eine Spannungsquelle angeschlossen oder über einen Motortreiber genutzt werden.
Grauer Geekservo
Der graue Geekservo (Geekservo 9g 270° Servo) ist ein 270-Grad-Servomotor und benötigt ebenfalls eine Spannung zwischen 3,3 und 6 Volt. Er wird mit drei Kabeln angeschlossen:
- Rot für die Versorgungsspannung
- Braun für Ground
- Orange für das Steuersignal
Er kann wie übliche Servomotoren genutzt werden, wie in meinem Post zu Servomotoren beschrieben. Gut geeignet ist der beispielsweise für die Lenkung eines Fahrzeugs.
Grüner Geekservo
Der grüne Geekservo (Geekservo 9g 360° Servo) ist ein dauerhaft drehender Servomotor und benötigt ebenfalls eine Spannung zwischen 3,3 und 6 Volt. Er wird ebenfalls mit drei Kabeln angeschlossen:
- Rot für die Versorgungsspannung
- Braun für Ground
- Orange für das Steuersignal
Mit der Pulsweite des PWM-Steuersignal kann man die Richtung und Geschwindigkeit des Motors verändern, dabei gilt:
- 500-1500 µs: Motor dreht rechts - je niedriger, desto schneller
- 1500 µs: Motor aus
- 1500-2500s: Motor dreht links - je höher, desto schneller
Hier ein Testprogrammm für den Calliope Mini, bei dem mit den Tasten A und B die Pulsweite verändert und damit Geschwindigkeit bzw. Richtung geändert wird.
input.onButtonPressed(Button.A, function () {
pulsweite = pulsweite + 50
pins.servoSetPulse(AnalogPin.P1, pulsweite)
})
input.onButtonPressed(Button.AB, function () {
pulsweite = 0
pins.servoSetPulse(AnalogPin.P1, pulsweite)
})
input.onButtonPressed(Button.B, function () {
pulsweite = pulsweite - 50
pins.servoSetPulse(AnalogPin.P1, pulsweite)
})
let pulsweite = 0
pulsweite = 1500
pins.servoSetPulse(AnalogPin.P1, pulsweite)
Das Tolle ist: Dieser 360°-Servo funktioniert ohne zusätzliche Spannungsquelle bei 3,3 Volt und ohne Motortreiber - in beide Richtungen und in unterschiedlichen Geschwindigkeiten. Also ideal für ein Mini-Robot-Car.