 Kittys Tech Blog
Kittys Tech Blog
Sensoren und Aktoren des Roboterfahrzeugs
Motoren
Für die Bewegung des Roboters sind als “Aktor” vor allem Motoren wichtig. Bei den Motoren unterscheidet man zwischen
- Gleichstrommotoren (DC-Motoren)
- Servomotoren und
- Schrittmotoren
Gleichstrommotoren haben zwei Anschlüsse und drehen sich, wenn sie mit einer Spannungsquelle verbunden werden. Ändert man die Pole drehen sie sich in die andrere Richtung. Ich verwende die Lego M- bzw. L-Motoren. In folgender Abbildung sieht man links dem M-Motor und rechts den L-Motor:

Servomotoren kann man so ansteuern, dass sie eine bestimmte Winkelpositon einnehmen. Ich verwende einen einfachen Micro-Servomotor
- an den ich mit Heißkleber an zwei Seiten Lego-Platten 2x3 geklebt habe und
- an den ich oben eine 2x2-Platte geschraubt habe.
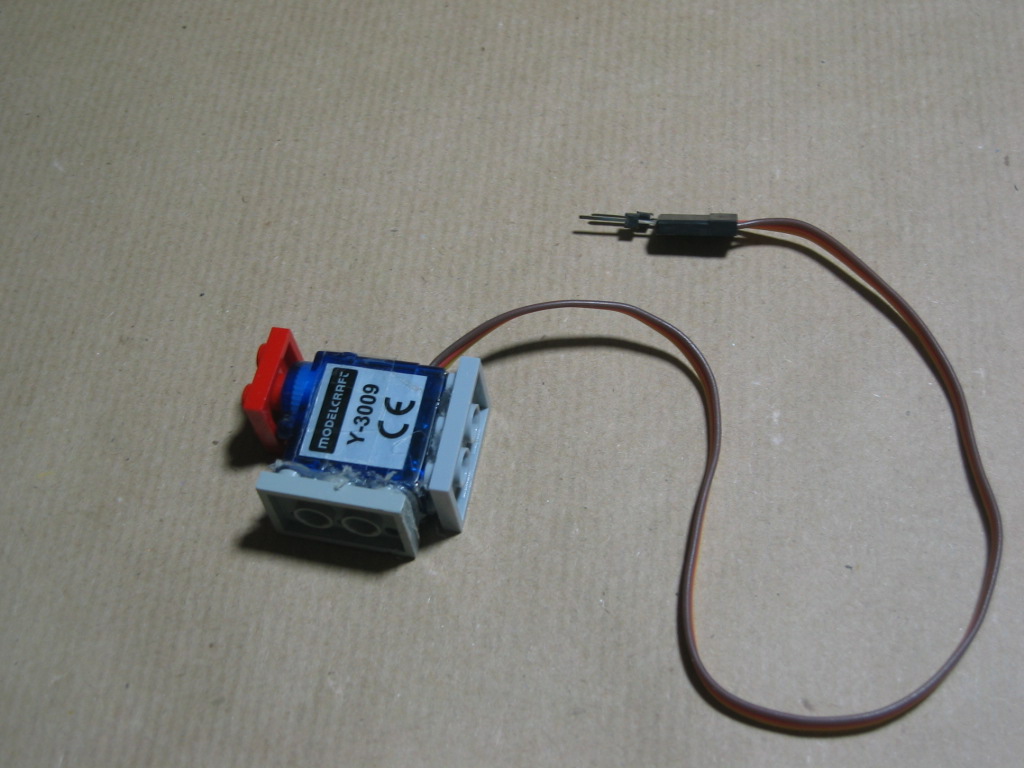
Er hat drei Anschlüsse:
- 5 V - Versorgungsspannung
- Ground
- PWM-Signal für Positionierung
Den Schrittmotor hab ich bislang noch nicht eingesetzt.
Sensoren
Folgende Sensoren möchte ich ausprobieren:
-
Ultraschallsensor für Abstandsmessung
-
Lage / Magnetfeld / Beschleunigungssensor für Richtungsbestimmung
-
Speedsensor
und weitere für:
- Kollisionserkennung
- Linienfolger
- usw.